


Flexible feeding technology has become indispensable in modern industrial production, offering exceptional adaptability and operational flexibility to enhance manufacturing efficiency. However, its cycle time often lags behind traditional bowl feeders. What factors influence flexible feeding cycle time, and how can manufacturers optimize it?
1. Part Dimensions and Geometry
Part size and shape critically impact flexible feeding cycle time. Oversized or undersized components may hinder robotic gripper access, while irregularly shaped parts often require additional alignment and secondary positioning. Complex geometries (e.g., asymmetrical or fragile components) demand extra calibration, extending cycle durations. Optimizing system design for diverse part profiles is essential to streamline workflows.

2. Precision Requirements and Grasping Orientation
High-precision parts (e.g., micro-fasteners, electronic sensors) or components requiring specific grasping orientations directly affect cycle time. Customized fixtures and prolonged calibration are often necessary to achieve ideal positioning. For parts with probabilistic orientation outcomes, vibration testing and contour-matching trays can improve target pose probability.

3. Vision System Accuracy and Sensor Responsiveness
Vision systems and sensors in flexible feeding setups ensure part detection and positioning accuracy. High-precision vision modules and rapid-response sensors enhance cycle stability by enabling real-time data feedback. Conversely, low-resolution systems increase pre-processing demands, slowing overall throughput.

4 Proven Strategies to Accelerate Flexible Feeding Cycle Time
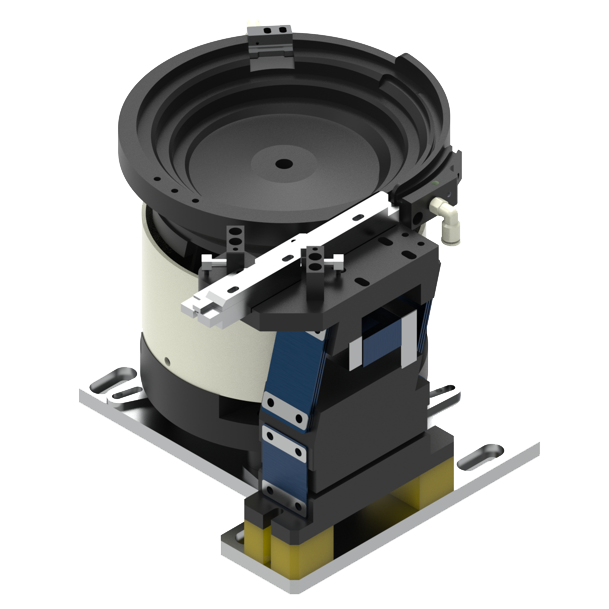
Flexible Vibration Feeder + Modular Units
Ideal for low-variability production lines, modular feeders offer speed but lack compatibility. Suitable for parts with infrequent changeovers.
Multi-Gripper Systems (Dual/Triple Gripping)
Simultaneous gripping of 2–3 parts per vision cycle reduces robotic movement time. Limited to parts with uniform shapes and sizes.
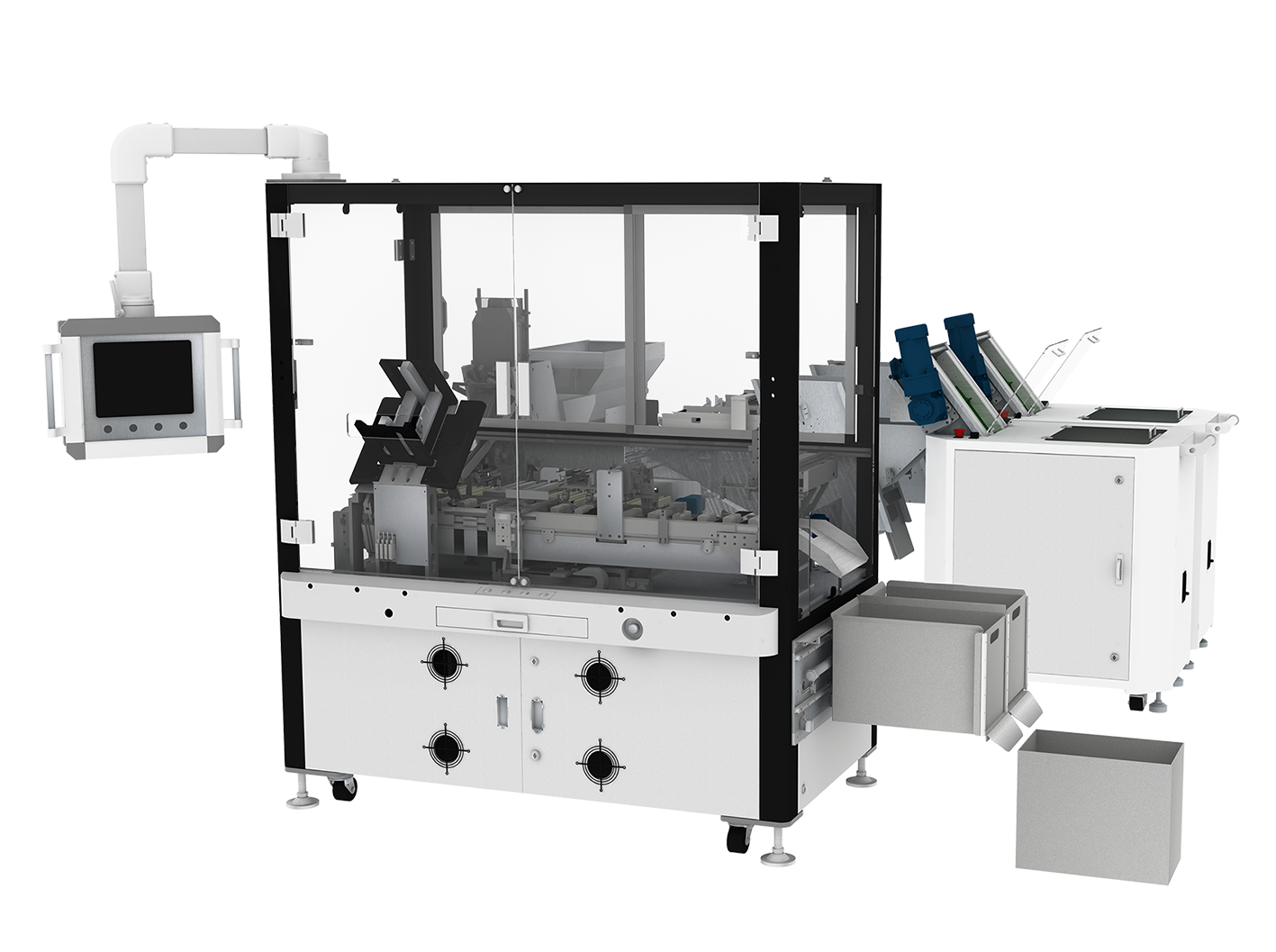
Flexible Feeder + Delta Robot (Spider Robot)
Delta robots achieve ultra-high speeds (up to 170 cycles/minute) but trade off precision and cost-effectiveness.
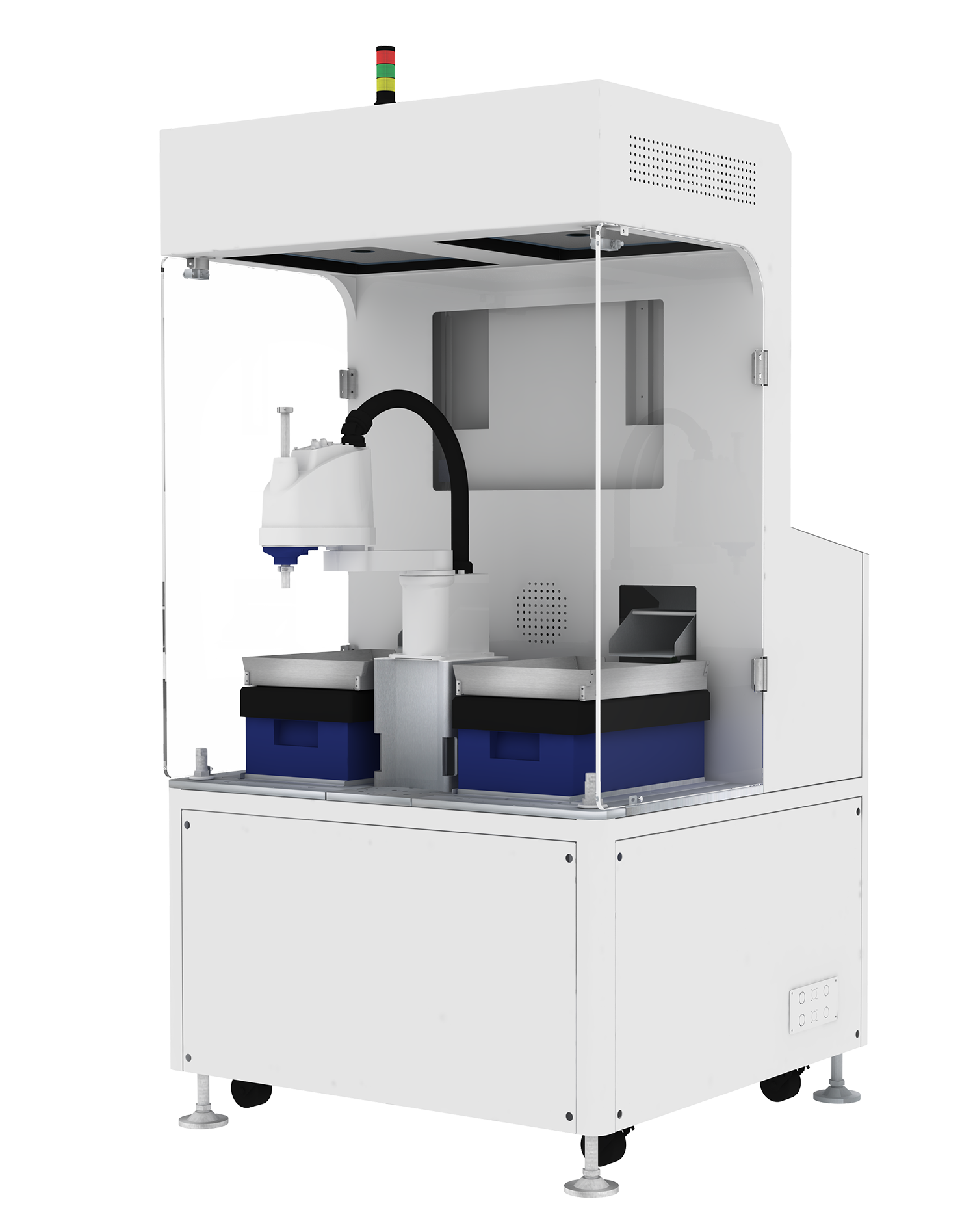
Buffer Mechanism Integration (4-Axis Robot + Flexible Feeder)
Buffer structures reduce reliance on vibration-based orientation adjustments, enhancing compatibility for mixed-part batches. Though slower, this method maximizes versatility.
Balancing Trade-offs for Optimal Solutions
Manufacturers must evaluate part specifications, cycle time targets, and budget constraints when selecting flexible feeding systems. Recent advancements in buffer mechanisms and multi-gripper designs demonstrate how human ingenuity continues to refine automation, merging creativity with machine precision to unlock new productivity frontiers.





 Home
Home Products
Products Telephone
Telephone Message
Message



